In preparation for building better running robots, researchers have made useful discoveries about some of nature’s most energy efficient bipeds – running turkeys.
Running birds have an impressive ability to run while minimizing energy cost, avoiding falls or injuries, and maintaining speed and direction. Researchers at Oregon State University have been trying to discover exactly how the birds do it.
“Birds appear to be the best of bipedal terrestrial runners, with a speed and agility that may trace back 230 million years to their dinosaur ancestors,” says Jonathan Hurst, an associate professor and robotics expert in the Oregon State College of Engineering.
The researchers began their study thinking that total body stability would be a priority, since it might help avoid falls and leg injuries. However, that’s not what they found.
Instead, running birds seem to have a different definition of stability – they avoid falls in part by allowing their upper bodies to bounce around. Like a scrambling football runner, they may sometimes speed up or slow down their leg motion. They move this way in the interest of staying upright, dealing with obstacles, and generally staying on course to where they are going. The process isn’t always the most elegant, but it works extremely well.

Modern robots, by contrast, are usually built with an emphasis on total stability, which often includes maintaining a steady gait. This can be energy intensive, and comes with the added drawbacks of limiting their mobility and speed.
RELATED: WORLD’S FIRST WALKING ROBOT STICK INSECT
What robotic science could learn from running birds, the scientists say, is that it’s useful to deviate from steady motions. In the future, our approaches to robotic movement “must embrace a more relaxed notion of stability, optimizing dynamics based on key task-level priorities without encoding an explicit preference for a steady gait,” the researchers find.
“The running robots of the future are going to look a lot less robotic,” Hurst predicts. “They will be more fluid, like the biological systems in nature. We’re not necessarily trying to copy animals, but we do want to match their capabilities.”
The researchers studied five species of birds and developed a computer model in OSU’s Dynamic Robotics Laboratory that closely matches the way birds move.
“We should ultimately be able to encode this understanding into legged robots so the robots can run with more speed and agility in rugged terrain,” says Christian Hubicki, a doctoral student at Oregon State University who co-authored the study. “These insights may also help us understand the walking and running behaviors of all the common ancestors involved, including theropod dinosaurs such as the velociraptor.”
Running birds come in a tremendous range of sizes, from tiny quails to an ostrich that has 500 times as much body mass. Many running birds can fly, but spend most of their lives on the ground. They don’t always look graceful when they run, but all birds maximize results while keeping their priorities straight – save energy and don’t break a leg. In the wild, an injury could lead to predation and death. Likewise, when food resources are limited, economy of motion is essential for survival.
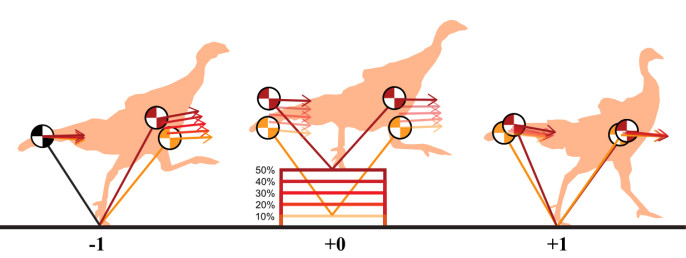
Even though running birds come in a wide variety of species with very different body sizes, they all use essentially the same strategies to move around on uneven surfaces. For example, in order to hop over obstacles on uneven ground, they use a motion that’s about 70 percent a “vaulting” movement as they approach the obstacle, and 30 percent a more-crouched posture while on top of the obstacle.
“Evolution has shaped running birds into all different sizes and skeletal structures,” Hubicki says. “But we found their behavior in how they run is essentially the same.”
“These animals don’t care that they appear a little unstable or have a waver in their gait,” Hurst adds. “Their real goal is to limit peak forces, avoid falling, be safe and be as efficient as possible. If their upper body seems to lurch around a little as a result, that’s okay. What they are accomplishing is really quite elegant.”
The study is published in the Journal of Experimental Biology.Collaboration on the research came from the Royal Veterinary College in the United Kingdom. The work was supported by the Biotechnology and Biological Sciences Research Council in the United Kingdom and the Human Frontier Science Program.
Images courtesy of Oregon State University